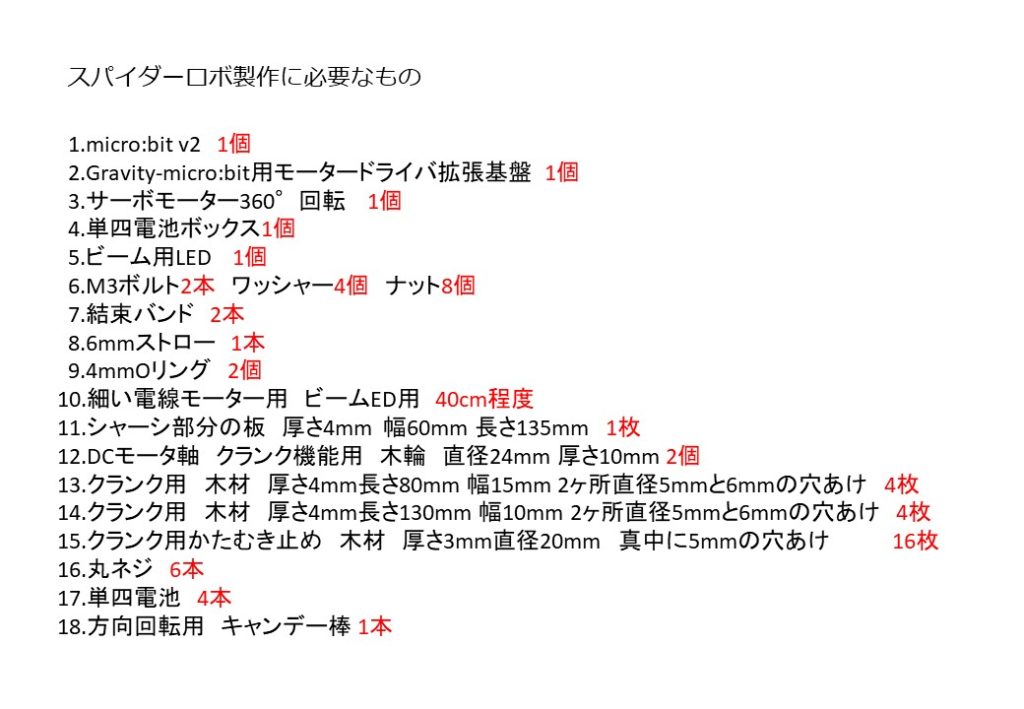
必要な材料
犬・猫の歩き方を採用
クランク機構の仕組み
このクランク機構の仕組みでスパイダーロボを動かしています。
(日立横浜理科クラブのyoutube抜粋)
安定した動きにするには、クランク機構のサイズの正確さとか直角に立つようにしないと真っすぐ歩きません。木材部品が多いためここが一番難しいです。
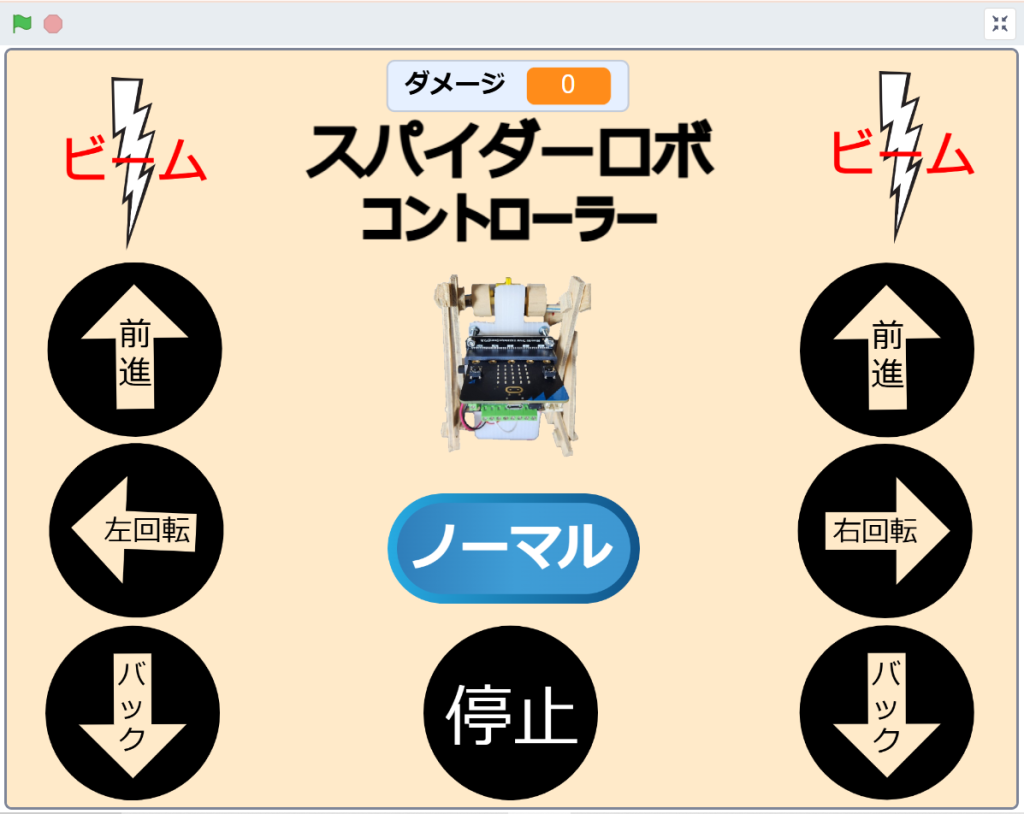
スパイダーロボットコントローラー(Windows・iPadの場合)
コントローラーは、Scratchのmicro:bit more版を使います。このプログラムはWindowsパソコンおよびiPadで作ることができます。各ボタンをWindowsパソコンはマウスで、iPadはタッチで機能します。
このScratchで作ったプログラムは、主にMakecodeへ動作の指令をだします。まずパソコンで作成し、それをiPadの「Scrub」というScratchアプリにインストールしました。
パソコンではマウス、iPadではタップで動かすことができます。
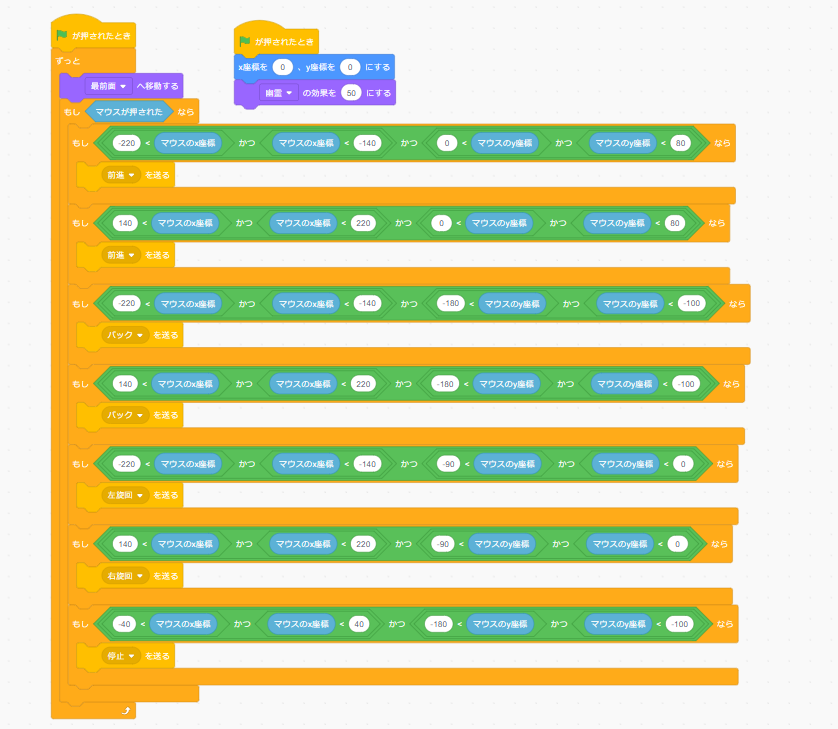
iPadではScratch micro:bit moreの「マウスが押されたとき」ブロックで作成しています。
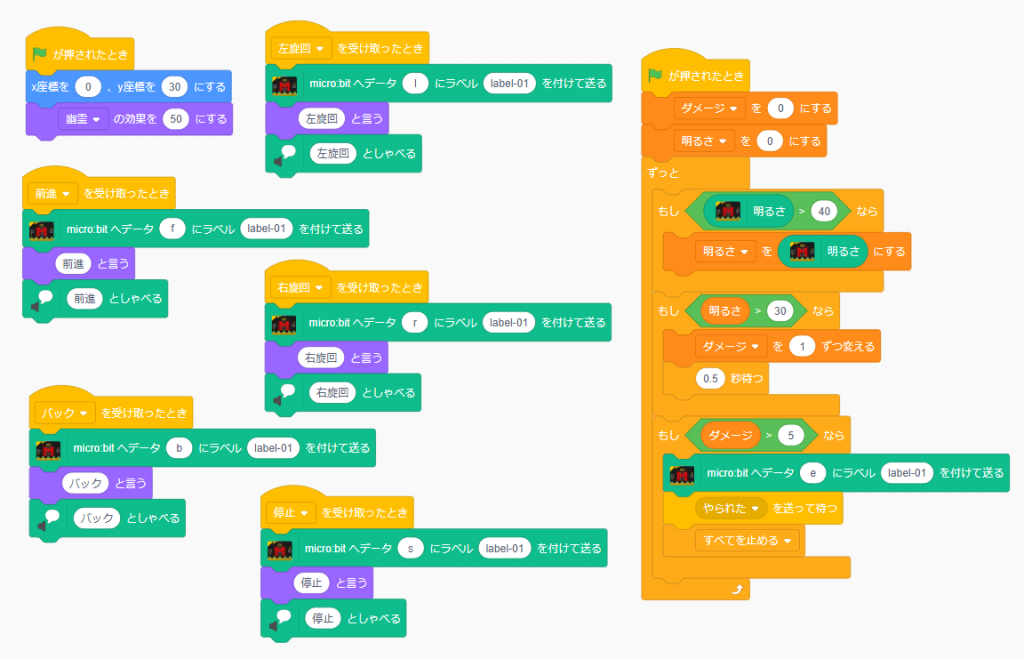
スクリプト 前進・左回転・右回転・バック・停止
スクリプト MakeCodeへの指示
micro:bitは常に上部5個のLEDで光感知をしており、Scratch micro:bit moreプログラムへ送り続けているのでMakeCodeプログラムは不要でScratch micro:bit moreプログラムだけでOK、ダメージカウントが5を超過したときにMakeCodeプログラムへストップ命令の「e」を送る。
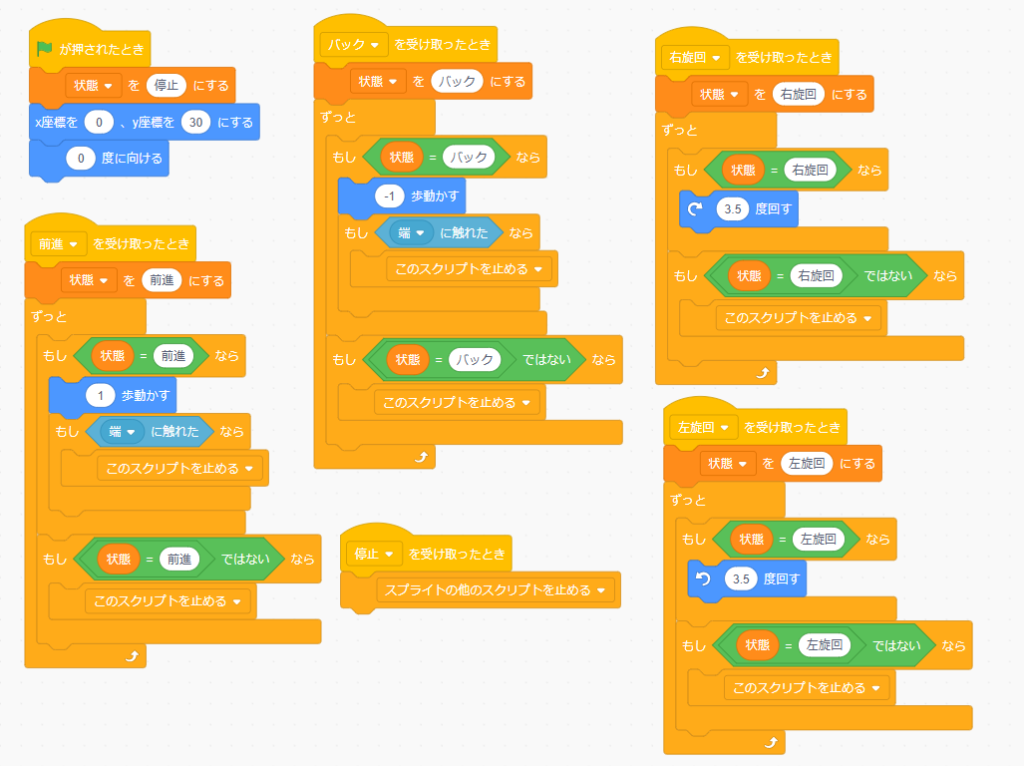
スクリプト Scratch画面上のスパロボの動き
スクリプト ビームの発射

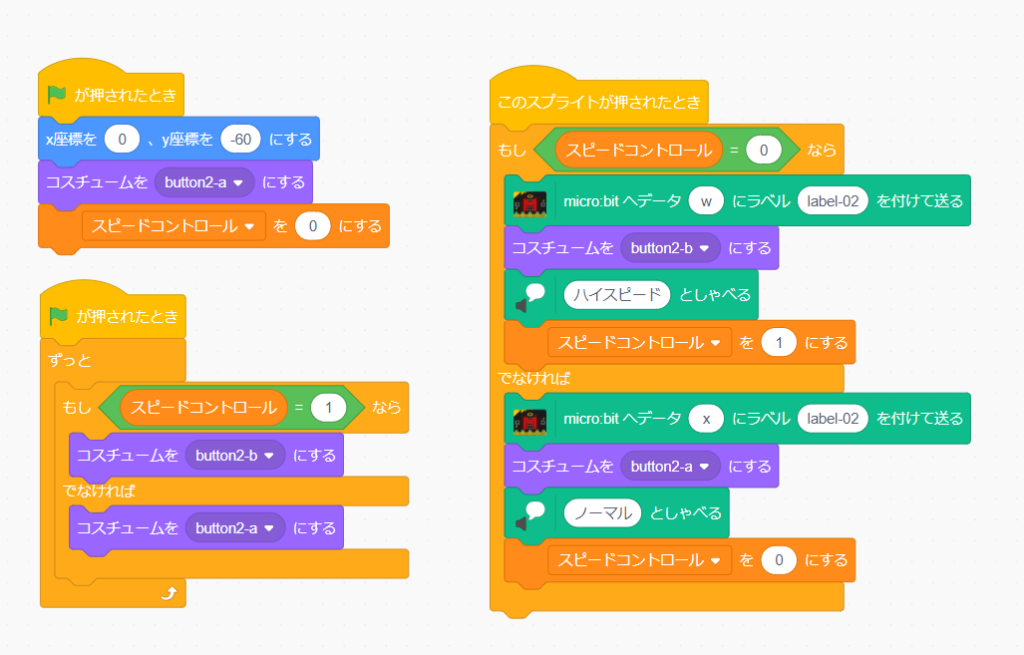
スクリプト スピードコントロール
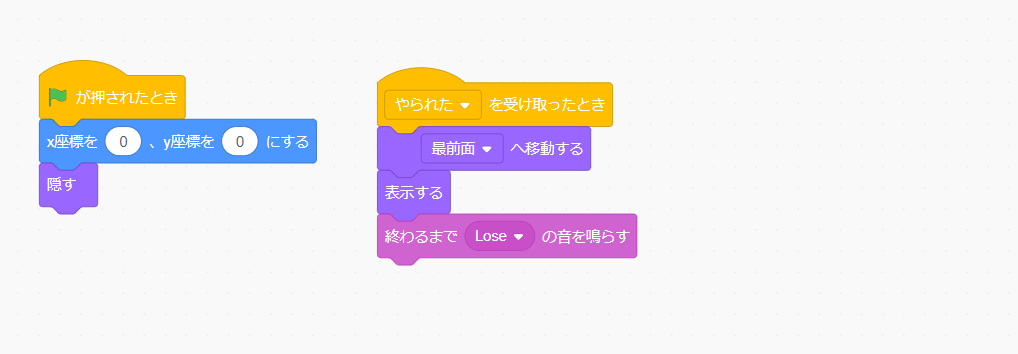
スクリプト ゲームオーバー
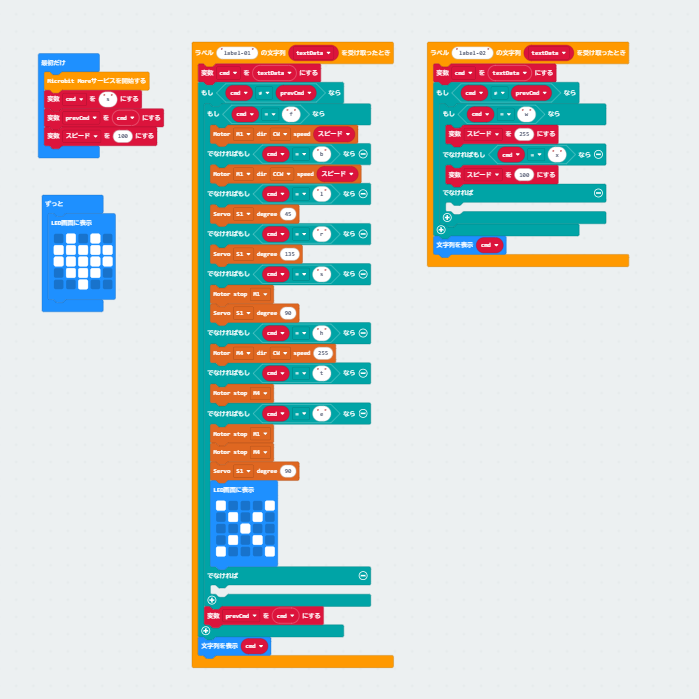
micro:bit(MakeCode)プログラム
makecodeへのmairo:bitmoreとかDCモータードライバー拡張ボードのアドイン方法はこちらです。